Моя
библиотека |
||||||
 |
||||||
 |
||||||
Программирование роботов на ROBOT C
|
||||||
Среда привлекательна тем, что позволяет программировать виртуальных роботов и тут же запускать их на виртуальных полигонах. Это удобно в тех случаях, когда есть, например, недостаток роботов в кружке /факультативе/ классе, где вы занимаетесь робототехникой, или же когда у вас нет возможности приобрести домой собственный набор, но продвигаться в изучении робототехники очень хочется.

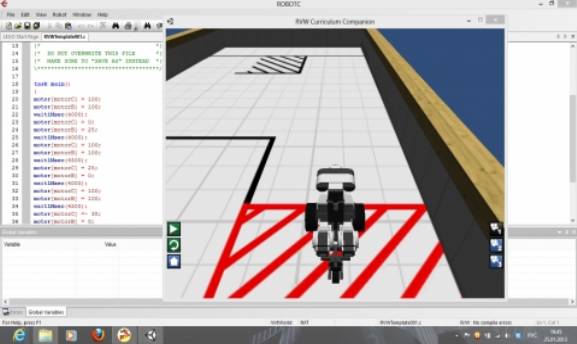
ROBOTC - основанный на тексте язык программирования, основанный на стандарте C ++ язык программирования.
Команды к роботу написаны как текст на экране, обработанном компилятором ROBOTC в файл языка программирования, и затем загрузили на робот, откуда ими можно управлять
Команды к роботу написаны как текст на экране, обработанном компилятором ROBOTC в файл языка программирования, и затем загрузили на робот, откуда ими можно управлять
Task main () {- главная задача начало программы
motor [motorC] = 100; ( вперед)
//Эта команда говорит роботу включать двигатель, приложенный к моторному порту C на 100%
motor [motorC] = -100; ( назад)
двигатель вращается в обратную сторону
двигатель вращается в обратную сторону
wait1Msec (3000);
//Это команда заставляет робота выполнить вышестоящие команды 3000 миллисекунд (3 секунды).
motor [motorC] = 0;
//Остановка мотора


motor[motorC]= 100;
motor[motorB]=0;
motor[motorB]=0;
motor[motorC]= 0;
motor[motorB]=0;
motor[motorB]=0;
motor[motorC]=100;
motor[motorB]=100;
motor[motorB]=100;

motor[motorC]= 100;
motor[motorB]= - 100;
motor[motorB]= - 100;
motor[motorC]= - 100;
motor[motorB]= - 100;
motor[motorB]= - 100;
Пример программы:
task main()
{
{
motor[motorC] = 50;
motor[motorB] = 50;
wait1Msec(4000);
motor[motorC] = -50;
motor[motorB] = 50;
wait1Msec(800);
}
Робот двигается вперед 50% оборотов двигателя в течении 4 секунд, затем делает поворот в течении 0,8 секунд
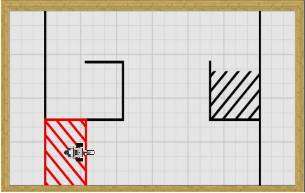
Создать программу парковка.
Робот выезжает из бокса делает левый поворот
Едет прямо, затем делает правый поворот,
едет прямо, останавливается у линии и
задним ходом с поворотом заезжает в черный бокс
Едет прямо, затем делает правый поворот,
едет прямо, останавливается у линии и
задним ходом с поворотом заезжает в черный бокс
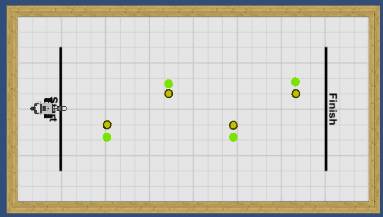
Создать программу Слалом.
Робот выезжает с стартовой линии используя датчик освещенности находит черную линию и движится по ней мимо фишек до финишной линии.
task main()
{
motor[motorC] = 100;
motor[motorB] = 100;
wait1Msec(4000);
motor[motorC] = 0;
motor[motorB] = 25;
wait1Msec(4000);
motor[motorC] = 100;
motor[motorB] = 100;
wait1Msec(4500);
motor[motorC] = 25;
motor[motorB] = 0;
wait1Msec(4000);
motor[motorC] = 100;
motor[motorB] = 100;
wait1Msec(4500);
motor[motorC] =- 30;
motor[motorB] = 0;
wait1Msec (4000);
motor[motorC] = -100;
motor[motorB] = -100;
wait1Msec(2500);
}
{
motor[motorC] = 100;
motor[motorB] = 100;
wait1Msec(4000);
motor[motorC] = 0;
motor[motorB] = 25;
wait1Msec(4000);
motor[motorC] = 100;
motor[motorB] = 100;
wait1Msec(4500);
motor[motorC] = 25;
motor[motorB] = 0;
wait1Msec(4000);
motor[motorC] = 100;
motor[motorB] = 100;
wait1Msec(4500);
motor[motorC] =- 30;
motor[motorB] = 0;
wait1Msec (4000);
motor[motorC] = -100;
motor[motorB] = -100;
wait1Msec(2500);
}